Система автоматичного управління
ГК “МІДІЕЛ” комплектує підйомні машини, що знову виготовляються, системою автоматизованого управління, контролю і реєстрації параметрів підйомної машини (САУКiРП-ПМ) власної розробки. Крім того, САУКiРП-ПМ пропонується для заміни морально застарілих релейно-контакторных систем управління діючих підйомних машин. Управління роботою підйомної машини здійснюється з автоматизованого робочого місця машиніста – пульта шахтного підйому.
Відмітними особливостями САУКiРП-ПМ є:
- використання сучасних програмованих логічних контроллерів (далі ПЛК) Simatic S7 – 1500, S7 – 1200;
- двоканальна архітектура системи;
- наявність сучасної розвиненої системи інтерфейсу “людина-машина”;
- можливість роботи з приводами змінного струму (асинхронний двигун з КЗ ротором, керований перетворювачем частоти, синхронний двигун, керований перетворювачем частоти, асинхронний двигун з фазним ротором, керований роторною станцією) та постійного струму (тиристорний перетворювач-двигун , генератор-двигун) за допомогою апаратних сигналів і/або шини даних (Profibus, Profinet, CAN);
- можливість роботи з гальмівними системами радіально-колодок і дискових за допомогою апаратних сигналів і/або шини даних (Profibus, Profinet, CAN);
- інтегрований реєстратор параметрів на базі програмно-апаратного комплексу IBA Pda.
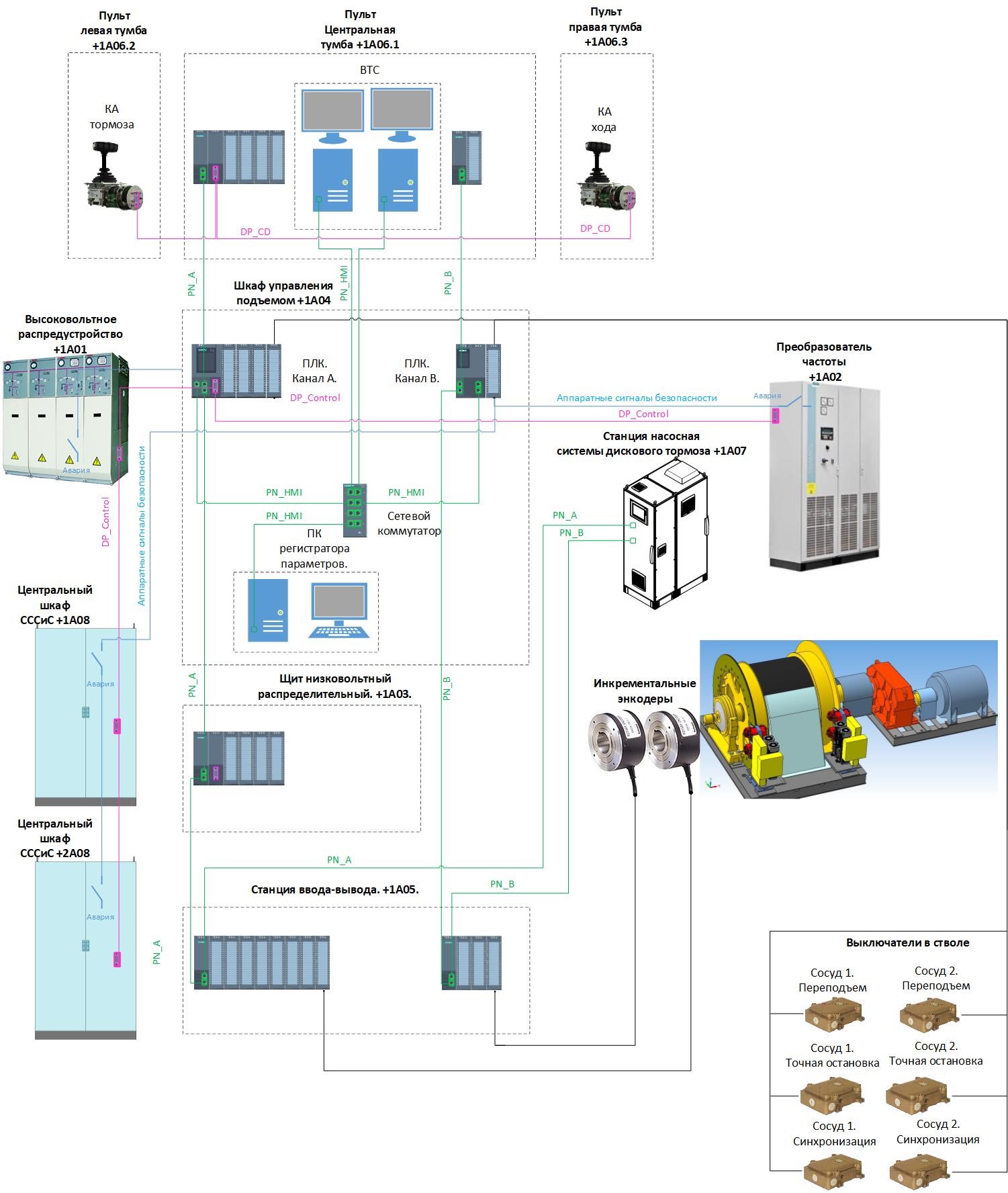
Структурно САУКiРП-ПМ складається з двох об’єднаних шинами зв’язку каналів. Кожен з каналів є незалежним ПЛК з підключеними облаштуваннями введення‐виведення сигналів, датчиками і органами управління. При виконанні програми управління ПЛК аналізує сигнали від датчиків і органів управління і формує сигнали управління устаткуванням підйомної установки. Для реалізації концепції двухканальности, контроль критичних параметрів роботи підйомної установки здійснюється обома каналами за допомогою подвоєної кількості датчиків. При цьому сигнали, отримані від датчиків, а також сигнали, що управляють, сформовані в першому і другому каналі, піддаються контролю еквівалентності. Таким чином, виконується контроль справності обох каналів САУКiРП-ПМ. У САУКiРП-ПМ застосовуються ПЛК різних моделей одного сімейства. Це дозволяє реалізувати захист від помилкового виконання програми, що управляє, пов’язаного з помилками в системному програмному забезпеченні або з апаратною несправністю ПЛК. При їх появі виникає розузгодження сигналів, що управляють, яке розпізнається підпрограмою контролю еквівалентності.
Структурна схема системи автоматизації
САУКіРП виконує функції взаємозв’язаного управління головним приводом, гальмом і усіма іншими механізмами підйомної установки, контролює їх роботу, реалізує усі потрібні Правилами безпеки функції защит і блокувань, в тому числі:
- введення і зберігання в пам’яті параметрів підйомної установки (глибина підйому, координати розташування путніх датчиків і так далі), необхідних для налаштування системи управління;
- введення і зберігання в пам’яті робочих і захисних діаграм для різних режимів роботи;
- обчислення завдання на швидкість обертання електроприводу;
- управління електроприводом;
- управління гальмом;
- контроль поточної швидкості за допомогою двох незалежних каналів і двох незалежних датчиків швидкості;
- визначення поточного положення посудин за свідченнями числоімпульсних лічильників двох незалежних каналів і шляхових датчиків, підключених до кожного з каналів;
- безперервне порівняння дійсних значень швидкості положення, визначених в кожному з каналів, між собою;
- автоматичний дзвінок уповільнення, що сигналізує про початок періоду уповільнення;
- захист від перевищення швидкості;
- захист від перепідйому;
- захист від зворотного ходу;
- захист від пробуксовки і сигналізацію про прослизання канатів (для ШПМ з шківом тертя);
- інші захисти і блокування, обумовлені вимогами ПБ і специфікою устаткування;
- формування повідомлень про спрацьовування защит або порушенні контрольних функцій.
До складу САУКиРП-ПМ входять наступні пристрої:
- шафа управління підйомом (ШУП) в якій розміщені ПЛК каналу А, ПЛК каналу В і реєстратор параметрів;
- щит низьковольтний розподільний (ЩНР), в якому розміщена пускова і захисна апаратура, джерела безперебійного живлення;
- станція введення-виведення (СВВ) для підключення датчиків і виконавчих механізмів, розташованих в машинному залі;
- пульт машиніста шахтного підйому (ПМ) з інтегрованою в нього відеотермінальною станцією (ВТС);
- апарат захисту і контролю руху (на вимогу замовника)
- инженерная станция (ИС);
- комплект технологічних датчиків і спеціальних кабелів.
Конструктивні рішення шафового устаткування, пульта машиніста індивідуальні для кожної підйомної машини, оптимальним чином враховуючи її призначення та особливі вимоги замовника.
Галерея конструктивних рішень САУКіРП
")


")
")
")
")
")
")
")
")
")
")
")

Система управління забезпечує наступні режими роботи підйомної машини згідно з призначенням:
- напівавтоматичний режим роботи (для клітьової та скіпової підйомних установок), при якому початок руху здійснюється машиністом, а подальше виконання циклу і зупинка машини відбувається автоматично;
- автоматичний режим роботи (для скіпової підйомної установки), при якому початок руху здійснюється по сигналу системи загрузки скіпа, подальше виконання циклу і зупинка машини відбувається автоматично;
- ручний режим роботи підйомної машини, при якому завдання швидкості і напряму руху посудини, а також величина гальмівного моменту здійснюється машиністом за допомогою руків’я командоаппаратов завдання ходу і гальма. Величина швидкості визначається як найменша (по модулю) зі швидкості, розрахованої на підставі діаграми руху для цієї точки шляху і напряму русі і швидкості, заданою командоаппаратом
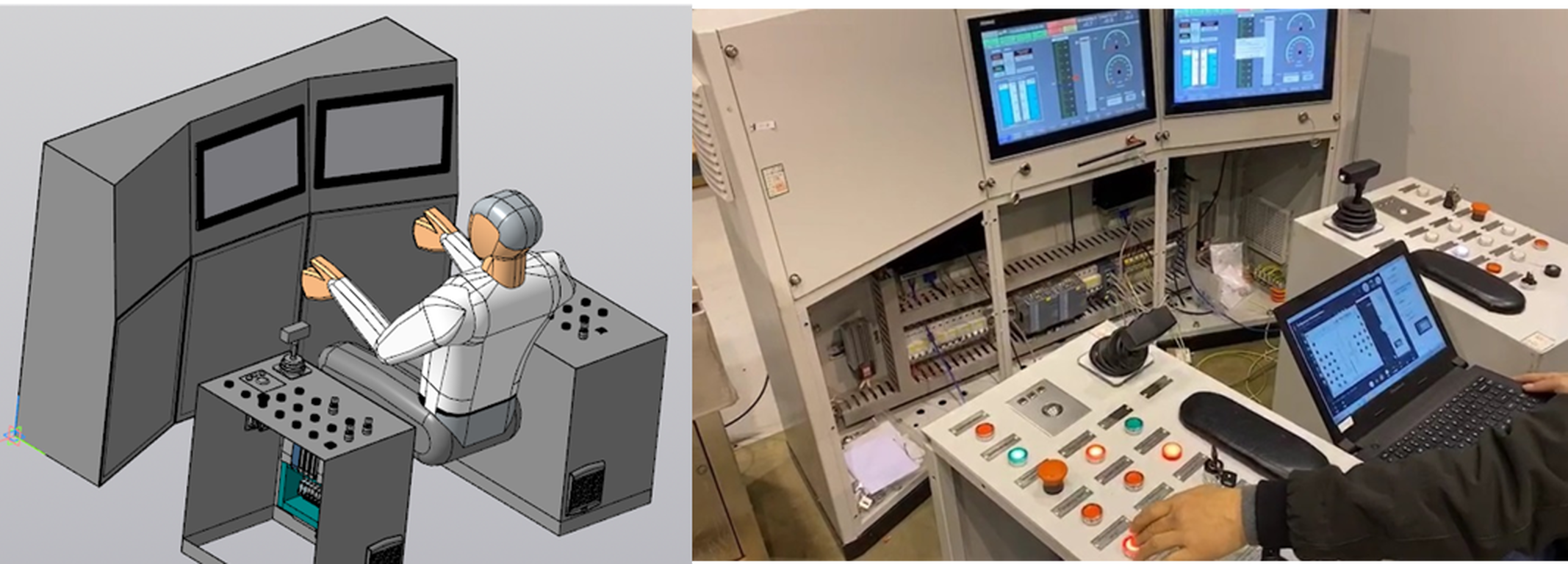
Управління роботою підйомної машини здійснюється з пульта машиніста шахтного підйому, який включає наступні складові:
- рабочее місце машиніста, що складається з двох тумб зі встановленим між ними кріслом;
- панель мониторов видеотерминальной станции (ВТС).
На верхніх горизонтальних і похилих поверхнях тумб розташовані елементи управління і сигналізації (кнопки, вимикачі, перемикачі, індикатори, звукові сигналізатори). На правій тумбі встановлений командоаппарат управління завданням ходу в ручному режимі, на лівій – командоаппарат управління гальмом в ручному режимі.
На тумбах пульта також розташовуються засоби голосового зв’язку з іншими робочими місцями підйомної установки. На лівій тумбі розташована панель голосового радіозв’язку з посудиною, на правій тумбі встановлені мікрофон, динамік гучномовного дротяного зв’язку з робочими місцями і телефон.
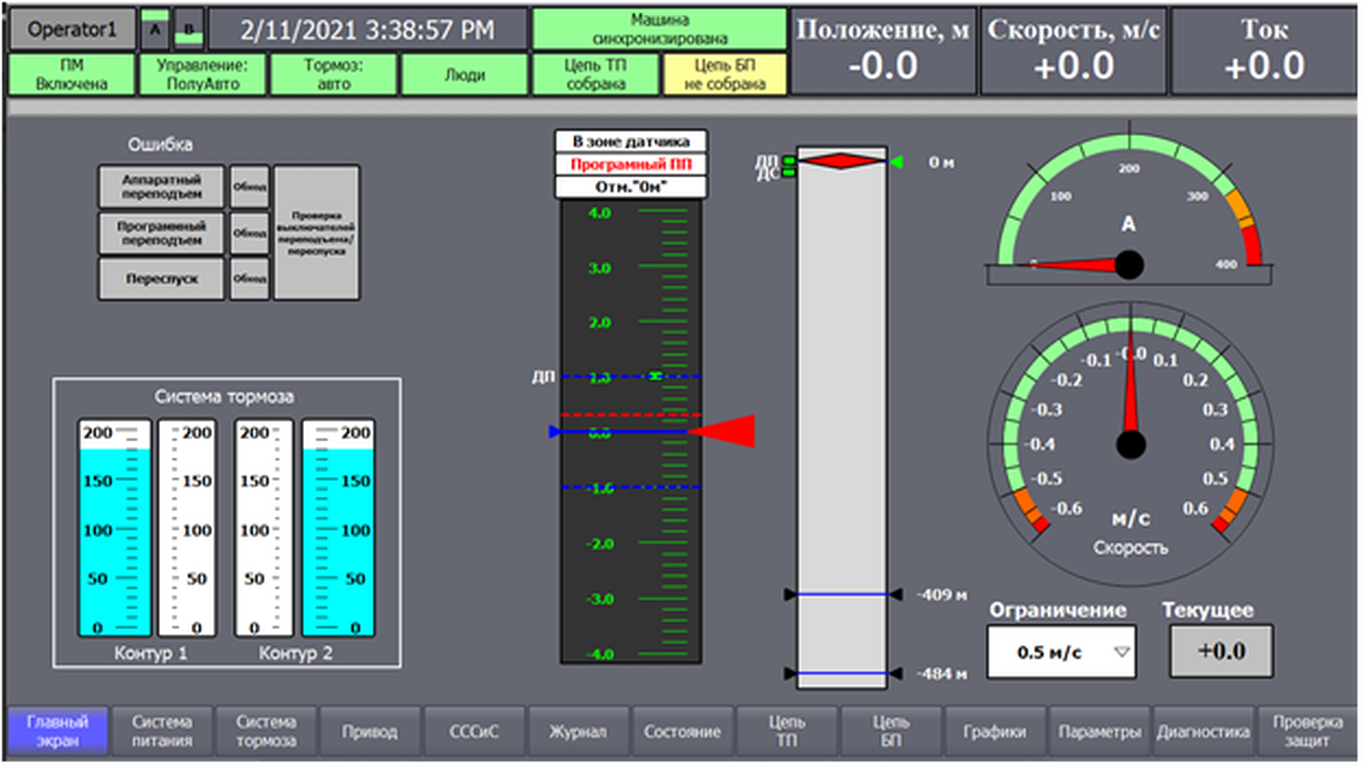
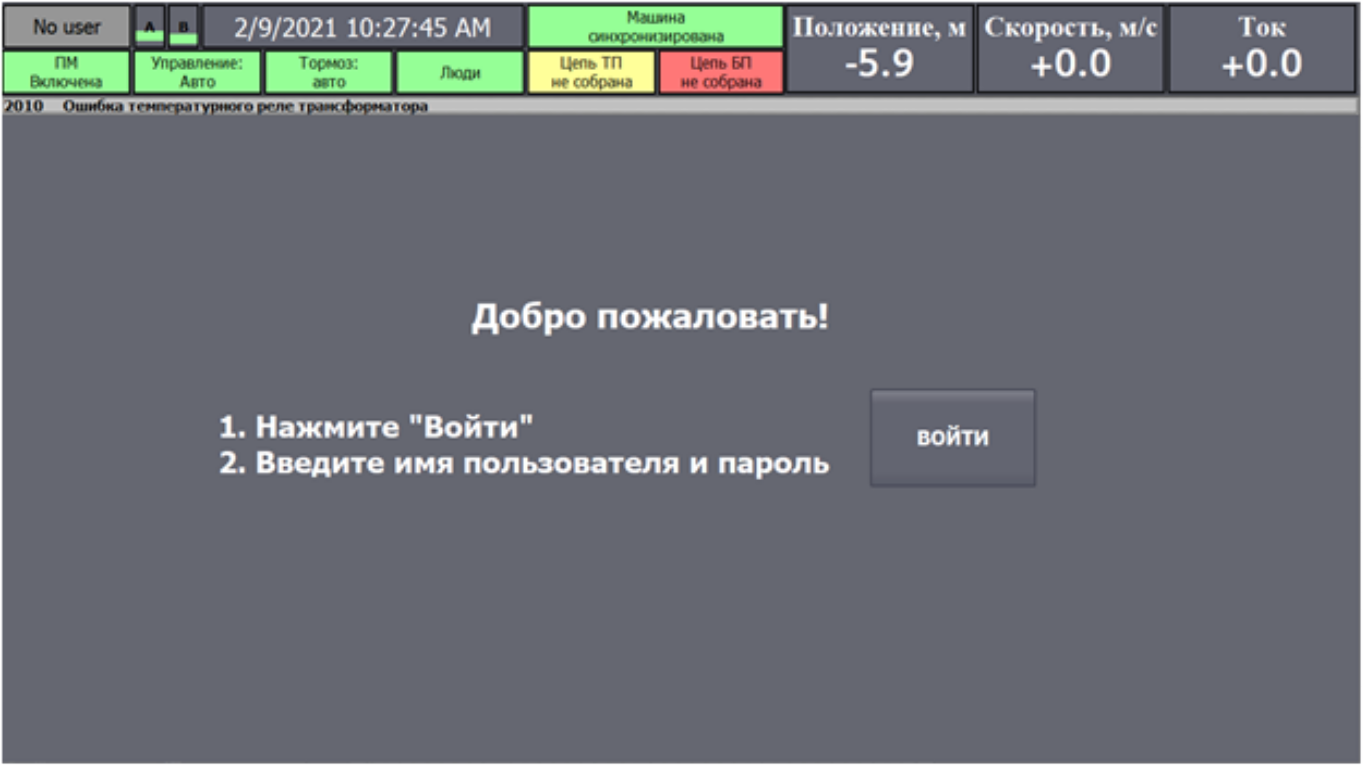
Перед машиністом розташована панель моніторів зі встановленими на ній двома або трьома (у разі наявності промтелебачення) моніторами. На двох моніторах, які входять до складу ВТС відображається стан підйомної установки. Третій монітор входить в систему промислового телебачення і встановлюється з потреби.
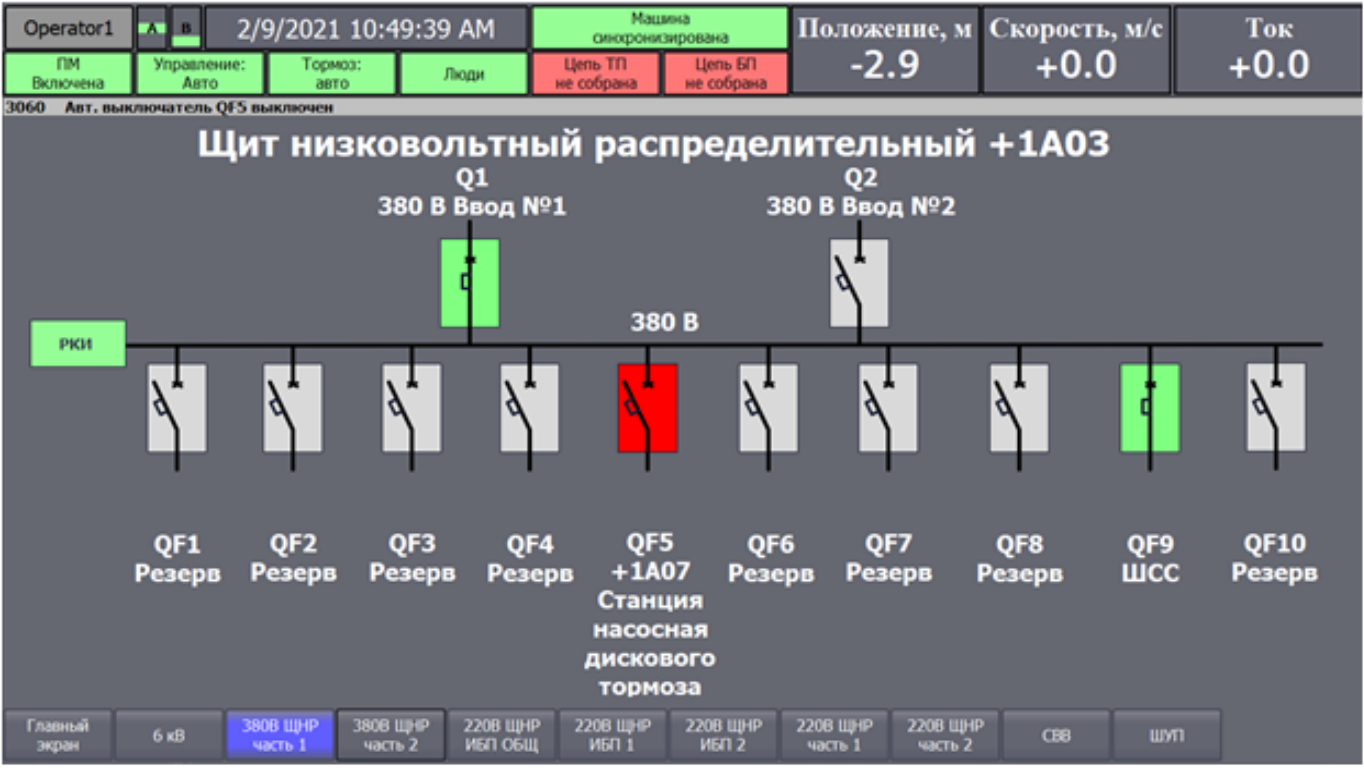
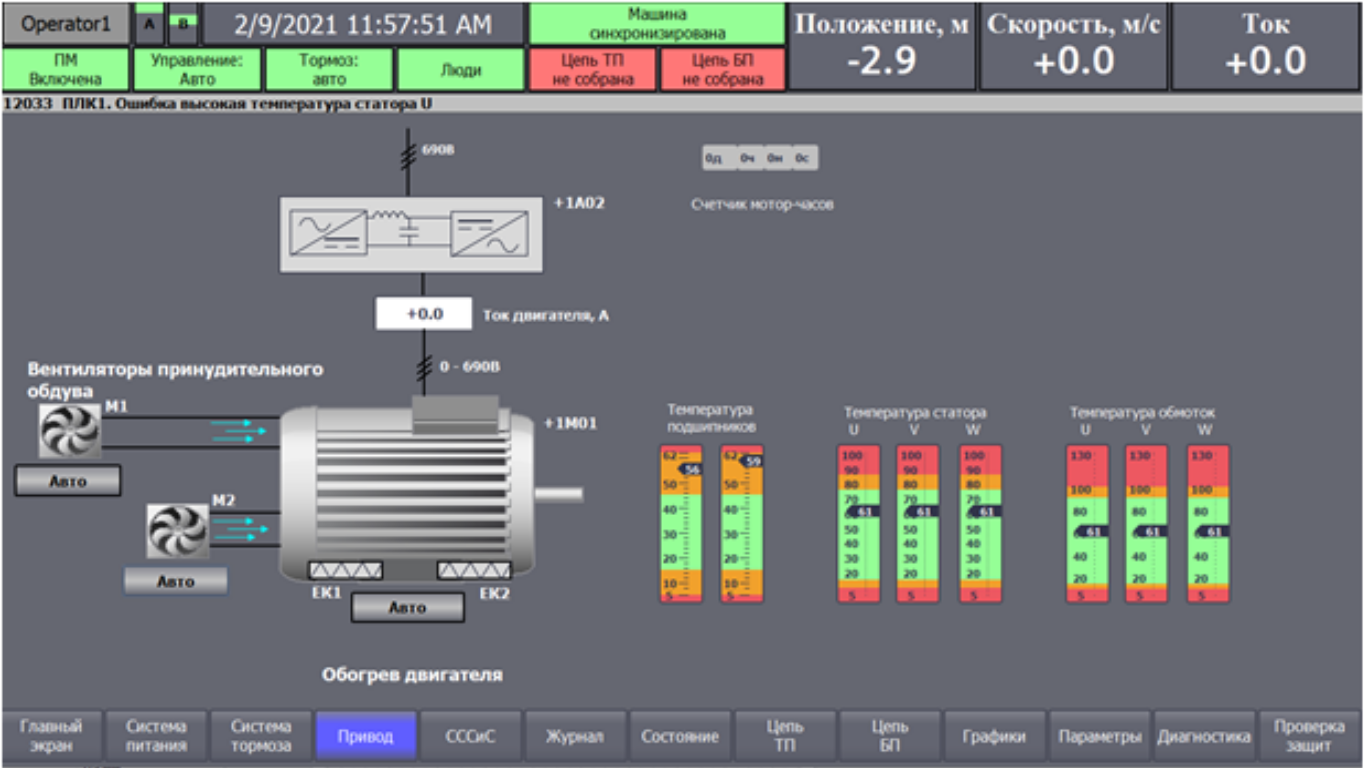
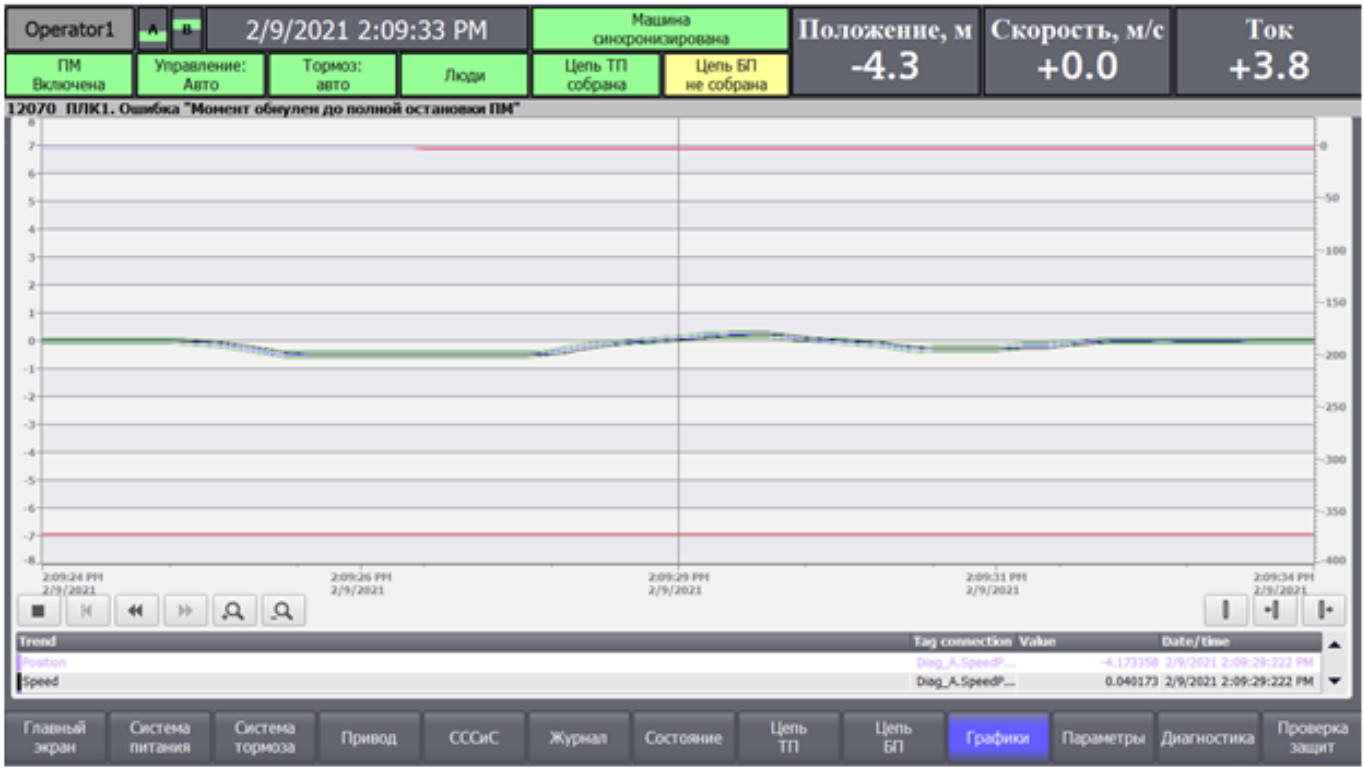
Екранні форми відеотермінальної станції







Проектування
УВикористання сучасних комп’ютерних программ проектування EPLAN Electric P8 і AutoCAD Electrical
Виготовлення
Устаткування виготовляється на одному із підприємств України чи ЕС за конструкторською документацією ГК “МІДІЕЛ”. Використовиваються комплектуючи вироби ведучих європейських виробників.