Група компаній МІДІЕЛ – MIDIEL Group
Провідний виробник шахтних підйомних машин, вентиляторів головного провітрювання та мобільного підйомного прохідницького обладнання
У 2023 році компанія (торгова марка) «МІДІЕЛ» відзначає своє 30-річчя. Після відкриття у 2004 році європейського представництва в особі «Midiel AB» (Швеція) утворилася Група компаній «МІДІЕЛ», яка позиціонує на ринку як системний інтегратор обладнання шахтних підйомних установок. Також у сферу діяльності ГК «МІДІЕЛ» входить обладнання для проходки вертикальних стволів (мобільні прохідницькі підйомні машини та прохідницькі лебідки), аварійно – рятувальні і аварійно – ремонтні пересувні машини та вентилятори головного провітрювання копалень та шахт. ГК «МІДІЕЛ» увібрала багаторічний досвід проектування та виробництва даного обладнання підприємствами України, а також сучасні технології європейських виробників. До складу ГК «МІДІЕЛ» входять такі компанії:
ТОВ «Мідіел МЕ» (Харків, Україна)
ТОВ «Мідіел МЕ» (Харків, Україна) – науково-виробнича, інжинірингова компанія за напрямками шахтні підйомні машини (ШПМ), аварійно-рятувальні пересувні підйомні машини, мобільні прохідницькі підйомні машини та прохідницькі лебідки. Має багатий досвід проектно-конструкторських робіт, виконує функції провідного партнера в Групі компаній:
- маркетинг та підготовка пропозицій на постачання ШПМ;
- розробка та погодження з проектним інститутом Замовника будівельних завдань та технічних проектів обладнання ШПМ;
- розробка проектної, робочої конструкторської та експлуатаційної документації для обладнання ШПМ як єдиного цілого комплексу, так і його частин, передача технічних завдань та конструкторської документації підприємствам – виробникам;
- контроль виготовлення та приймання обладнання на заводах-виробниках;
- шефмонтаж, шефналагодження обладнання, навчання персоналу у Замовника;
- постачання обладнання по Україні та з України.
ТОВ НВФ «Мідіел» (Харків, Україна)
ТОВ НВФ «Мідіел» (Харків, Україна) – науково-виробнича, інжинірингова компанія за напрямками шахтні підйомні машини (ШПМ) та вентилятори головного провітрування. Має багатий досвід проектно-конструкторських робіт, виконує функції провідного партнера в Групі компаній.
«Midiel AB» (Гетеборг, Швеція)
«Midiel AB» (Гетеборг, Швеція) – виступає власником контракту на зовнішньоекономічні замовлення, має багатий досвід виготовлення та постачання обладнання ШПМ європейського виробництва, має напрацьовані зв’язки з більшістю європейських виробників обладнання, забезпечує фінансування проектів, комплектне постачання обладнання, митні та логістичні функції.
«Midiel Balkani Ltd» (Пловдив, Болгарія)
«Midiel Balkani Ltd» (Пловдив, Болгарія) – виступає власником контракту на зовнішньоекономічні замовлення, здійснює розміщення замовлень запроектованих частин гірничошахтного обладнання, виконує контроль та приймання замовлення, функції інтегратора частин та комплектуючих, складські та митно-транспортні функції.
«Midiel Engineering AG» (Швейцарія)
«Midiel Engineering AG» (Швейцарія) – виступає власником контракту для максимально надійної реалізації фінансової та товарної логістики при реалізації контрактів на постачання.
«Midiel AB IS» (Гонконг)
«Midiel AB IS» (Гонконг) – виступає власником контрактів та здійснює розміщення замовлень на виготовлення частин та комплектуючих для гірничошахтного обладнання в Євросоюзі та за його межами для максимально надійної реалізації фінансової та товарної логістики під час виконання контрактів.
Стаціонарні підйомні установки
ГК «МІДІЕЛ» проектує та комплектно постачає наступні види стаціонарних підйомних машин індивідуального виробництва:
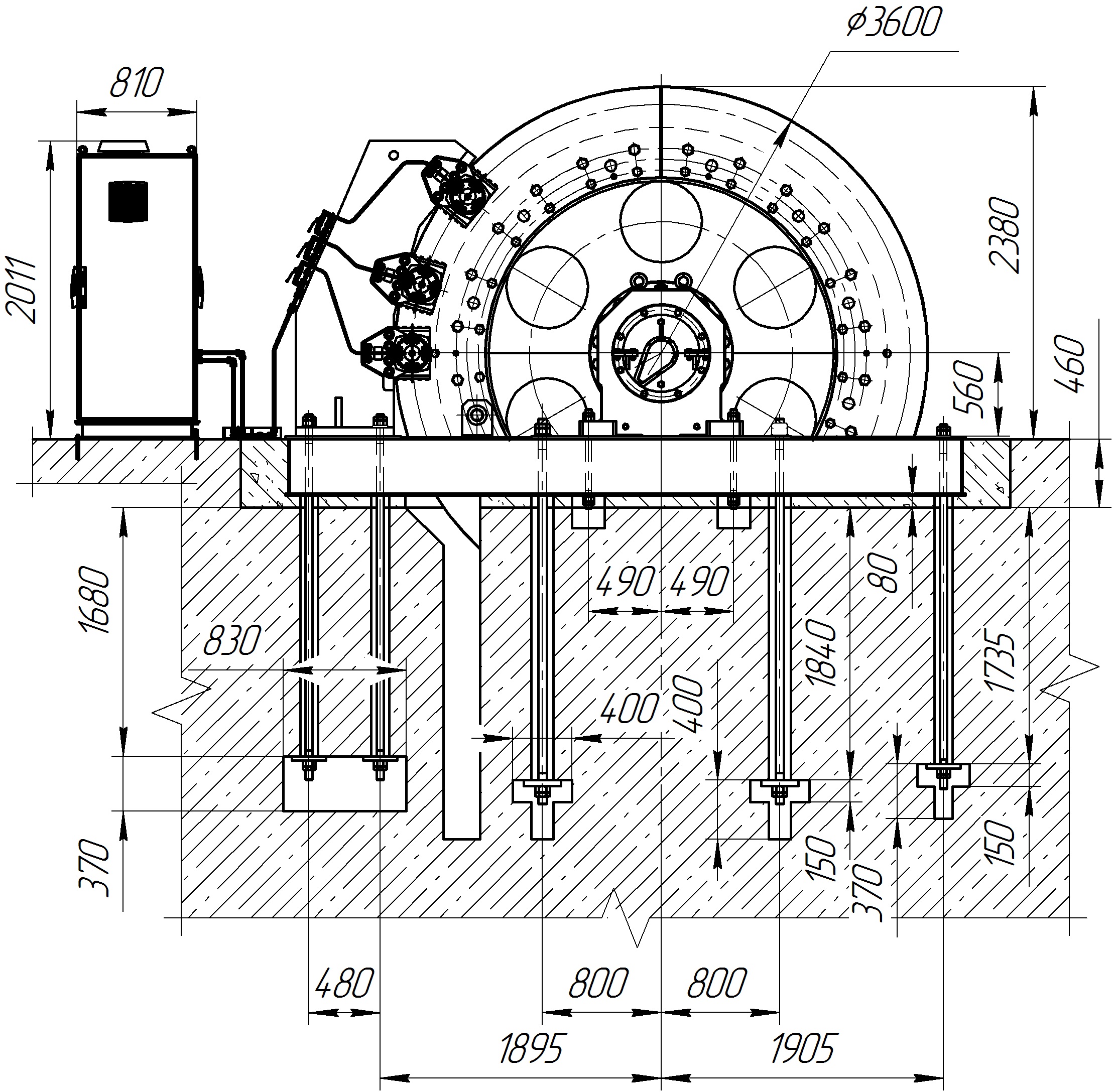
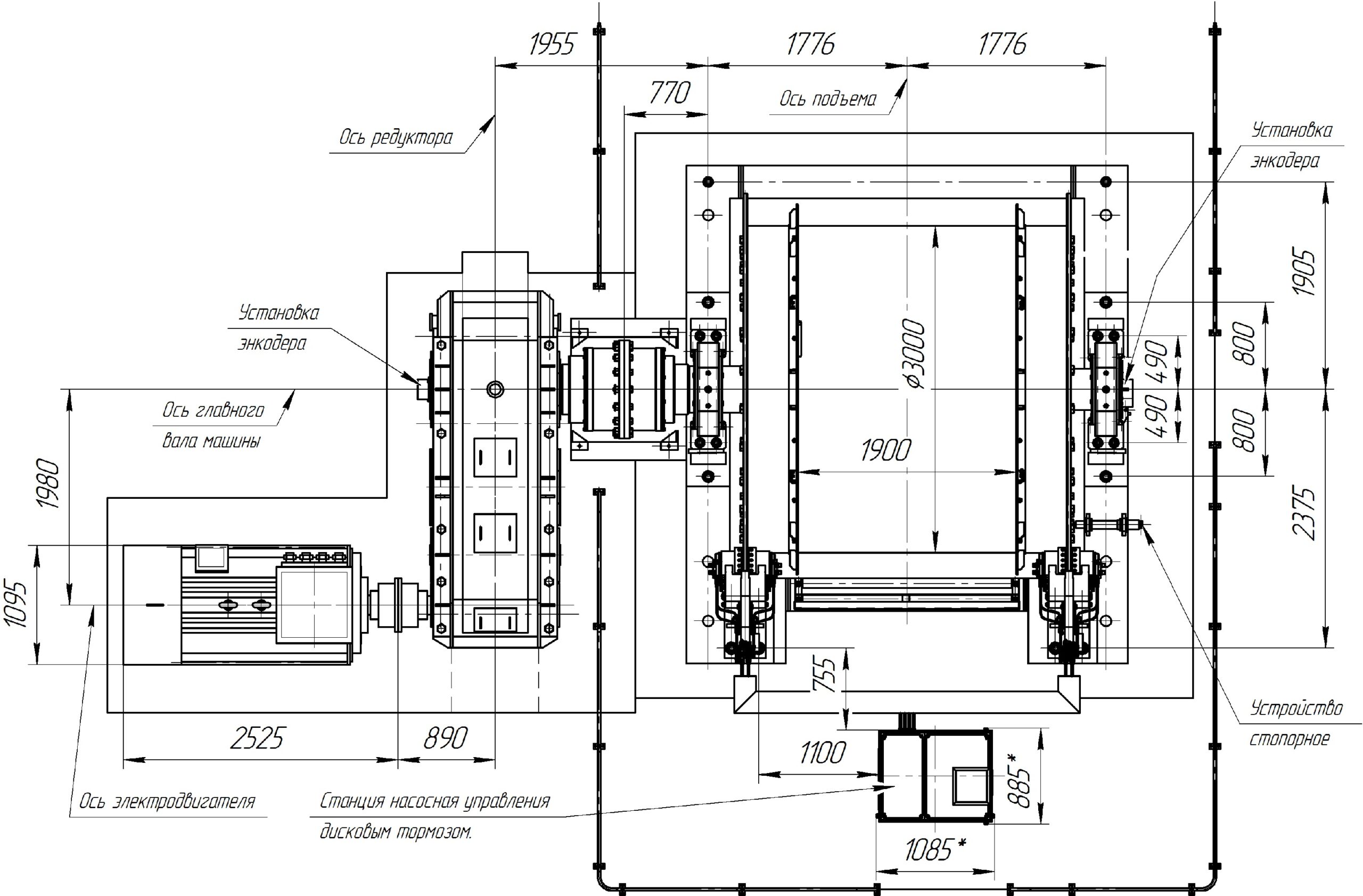
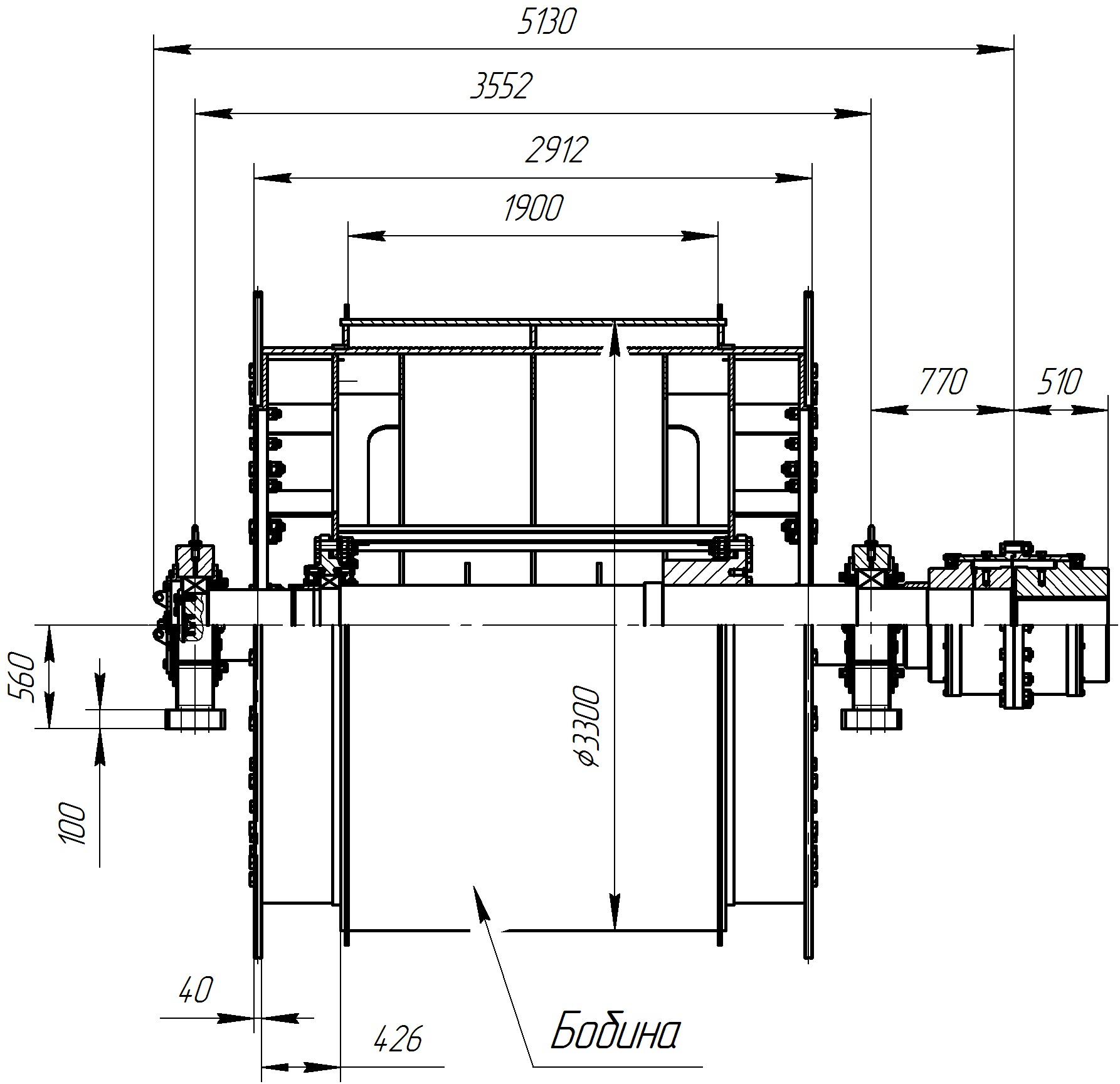
1. Барабанні підйомні машини наземного та підземного (вибухозахищеного) виконання:
- однобарабанні, в тому числі з розрізним барабаном з діаметром барабана від 1,6 м до 6,3 м;
- двобарабанні з діаметром барабана від 3 м до 6,3 м.
2. Багатоканатні підйомні машини (з шківом тертя) баштового та наземного розташування з діаметром шківа від 2,1 м до 5 м.
Детальніше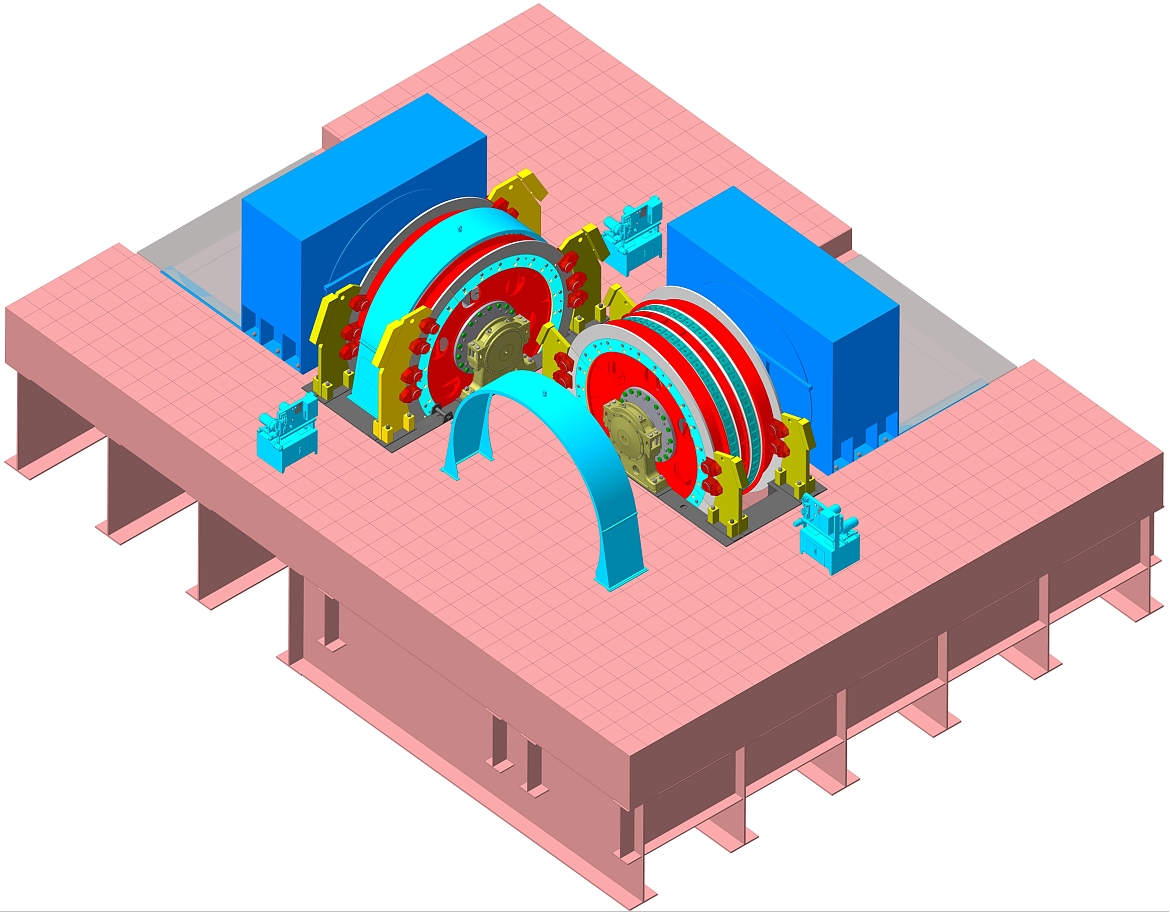

Обладнання для проходки вертикальних стволів
Мобільні прохідницькі машини застосовуються як однокінцеві підйомні установки. Загалом призначені для підйому та спуску людей та вантажів в баддях та клітях при проходженні вертикальних стволів. Подекуди вирішують задачі підйому та спуску людей та вантажів при виконанні аварійних, ремонтних та інспекторських робіт у вертикальних стволах. Прохідницькі лебідки є основним засобом для підвіски, спуску та підйому прохідницьких полків, опалубок, насосів, направляючих канатів, трубопроводів, кабелів та іншого прохідницького і гірничошахтного обладнання при прохідці, заглибленні, армуванні та ремонті вертикальних стволів шахт.
ДетальнішеВентилятори головного провітрювання
Фахівцями ГК «МІДІЕЛ» розроблено серію одноступінчастих осьових вентиляторів ВО. Вентилятори даної серії призначені для установок головного провітрювання шахт і рудників гірничодобувної промисловості, і можуть застосовуватись у вентиляційних системах підприємств металургійної, хімічної і інших галузей промисловості. Типорозмірний ряд вентиляторів містить нереверсивні вентилятори типу ВО-18ВК, ВО-21-ВК, ВО-24ВК, ВО-30ВК, ВО-35ВК, ВО-40ВК, ВО-50ВК і реверсивні вентилятори тих самих типорозмірів із діаметром робочого колеса від 1800 до 5000 мм.
Детальніше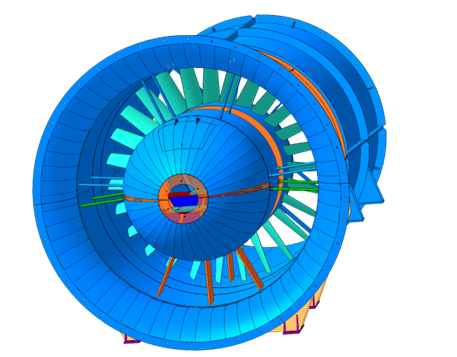
Технологія заміни великих підйомних машин
ГК «МІДІЕЛ» пропонує заміну великих підйомних машин з мінімальним простоєм підприємства.
ДетальнішеМашина підйомна аварійно-ремонтна МПАР-63-1000Д
Для підйому та спуску людей, вантажів при виконанні аварійних та ремонтних робіт у вертикальних стволах ГК «МІДІЕЛ» пропонує машину підйомну аварійно-ремонтну МПАР-63-1000Д.
Детальніше